Nuevas Publicaciones
De la colmena al código: cómo las abejas modelan la robótica de enjambre
Reciente publicación en la APS de una colaboración de la que forma parte Ezequiel Ferrero, doctor en física del Instituto de Nanociencia y Nanotecnología, INN (CNEA-CONICET).
{kind=link}
Las abejas melíferas han fascinado durante siglos a científicos y observadores de la naturaleza. Su capacidad para organizarse y tomar decisiones colectivas de manera eficiente ha inspirado investigaciones en diversas disciplinas, desde la biología hasta la inteligencia artificial. Ahora, una serie de estudios de reciente publicación en la revista internacional Physical Review Research, han analizado a fondo un modelo de toma de decisiones colectivas basado en el comportamiento de estos insectos, revelando principios clave aplicables a sistemas artificiales como enjambres de robots.
El arte de decidir en grupo
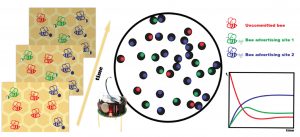
Cuando un enjambre de abejas busca un nuevo hogar, no lo hace de manera caótica. Algunas abejas exploran el entorno de forma independiente, mientras que otras se guían por la información compartida a través del famoso "baile del meneo". Este equilibrio entre exploración individual e interacción social permite que el grupo tome decisiones acertadas, maximizando la calidad de la opción elegida.
El estudio analizó este mecanismo mediante un modelo matemático y lo implementó en enjambres de pequeños robots, conocidos como kilobots. Los resultados mostraron que estos robots pueden alcanzar un consenso descentralizado, similar al de las abejas. Sin embargo, la precisión del consenso depende de factores como la densidad del grupo y la movilidad de los robots, aspectos clave para optimizar la toma de decisiones en sistemas artificiales.
El compromiso entre velocidad y precisión
Uno de los hallazgos más interesantes del estudio es la existencia de un compromiso entre rapidez y exactitud en la decisión. Además, el modelo matemático utilizado reveló que, bajo ciertas condiciones, el sistema alcanza niveles óptimos de consenso en un estado crítico, un patrón común en los sistemas biológicos. Esto sugiere que la criticidad podría ser un mecanismo evolutivo que optimiza la toma de decisiones colectivas en entornos inciertos.
En conversación con Ezequiel Ferrero, investigador independiente del CONICET en el Instituto de Nanociencia y Nanotecnología (CNEA-CONICET), explica que existe toda un área de investigación dedicada a cómo las leyes psicofísicas que influyen en la toma de decisiones colectivas, especialmente en superorganismos como colonias de hormigas o abejas. Estas leyes describen cómo la intensidad de un estímulo (cantidad, volumen, brillo, etc.) afecta su percepción.
La Ley de Weber establece que la menor diferencia perceptible entre dos estímulos es proporcional al estímulo base. Por ejemplo, podemos notar fácilmente la diferencia entre un grupo de 20 bolitas y otro de 25, pero nos cuesta distinguir entre 140 y 145 sin contarlas.
“En nuestro modelo, el "estímulo" representa la calidad de las opciones evaluadas por los agentes. Comprobamos que la Ley de Weber se cumple cuando los agentes logran un consenso en una decisión binaria: al mantener una opción fija y modificar la otra, encontramos el punto donde el grupo empieza a distinguirlas. Es fascinante observar cómo colonias de insectos, enjambres e incluso sistemas de robots parecen comportarse como un solo "superorganismo" al procesar información y tomar decisiones colectivas. Algunos investigadores llaman a esto "inteligencia colectiva"”, comenta Ferrero.
Aplicaciones futuras: de enjambres de abejas a robots inteligentes
Comprender cómo los sistemas descentralizados logran consenso tiene aplicaciones potenciales en tecnologías emergentes. Por ejemplo, nos ayuda a mejorar la coordinación de enjambres de drones o el funcionamiento de redes de comunicación. La naturaleza, como en el caso de las colonias de abejas o bandadas de aves, nos da pistas sobre cómo lograr decisiones eficientes en grupo sin necesidad de una autoridad única.
“Como ocurre con toda investigación teórica, es difícil trasladar directamente nuestros resultados a aplicaciones prácticas. Sin embargo, nuestro estudio revela factores clave que influyen en la toma de decisiones colectivas en sistemas de agentes autónomos, como la densidad (qué tan agrupados están) y la movilidad de los agentes (velocidades y reglas de movimiento). A diferencia de sistemas físicos tradicionales, donde las partículas interactúan desde posiciones fijas, en estos sistemas los agentes están en constante movimiento. Aun así, encontramos qué principios fundamentales de la física estadística siguen siendo aplicables”, explica Ferrero.
“En particular, identificamos un parámetro que llamamos "cobertura de comunicación", que combina variables como la densidad de agentes, su movilidad y el alcance de sus interacciones. Este concepto permite analizar la dinámica de consenso en sistemas móviles de manera similar a cómo se estudian en redes estáticas.Desde una perspectiva práctica, nuestros resultados pueden ayudar a definir los requisitos mínimos para que un sistema de robots autónomos logre consenso de manera efectiva, o cómo ajustar estos parámetros según el nivel de acuerdo deseado”, concluye Ezequiel Ferrero.
Este estudio no solo refuerza el papel de las abejas como modelos de organización inteligente, sino que también abre nuevas puertas para el diseño de sistemas tecnológicos inspirados en la naturaleza. Hoy en día ya vemos enjambres de robots colaborando en tareas complejas, aunque en general comandados por un cerebro central. Pero cada vez con mayor frecuencia los veremos organizados de manera descentralizada y autónoma, tal como lo hacen las abejas en la naturaleza.
Publicaciones científicas:
David March-Pons, Julia Múgica, Ezequiel E. Ferrero, and M. Carmen Miguel (2024). Honeybee-like collective decision making in a kilobot swarm. Physical Review Research, 6(3), 033149. https://doi.org/10.1103/PhysRevResearch.6.033149
March-Pons, D., Ferrero, E. E., & Miguel, M. C. (2024). Consensus formation and relative stimulus perception in quality-sensitive, interdependent agent systems. Physical Review Research, 6(4), 043205. https://doi.org/10.1103/PhysRevResearch.6.043205